Nicolas Sänger - Arbeitsgebiet: Reglerschnittstellen für die flexible Mehrkörperdynamik
Reglerschnittstellen für die flexible Mehrkörperdynamik
Demonstrationsträger: Kabelsimulation und Kuka-Leichtbau-Roboter
Bei dem folgend beschriebenen Demonstrationsträger handelt es sich um die Modellierung eines Kuka-DLR-Leichtbauroboters (LBR). Der Roboterarm ist mit acht Starrkörpern modelliert, das Kabel wird durch eine geometrisch exakte Balkenformulierung modelliert und sowohl Stecker als auch Kabelbefestigung jeweils durch Starrkörper. Sieben angetriebene Gelenke dienen der Aktuierung des Roboterarms.
Die Hartenberg-Denavit-Parameter des Roborarms sind beim Hersteller des Roboters, der KUKA Roboter GmbH, Augsburg, erhältlich, ebenso CAD-Daten der äußerden Geometrie und Informationen zur Gesamtmasse (12kg). Daten zu Trägheitseigenschaften der Einzelkörper, Leistungsdaten der Servoantriebe und Information zur Steuerstrategie, wie sie für eine realitätsnahe Simulation wünschenswert wären, sind nicht erhältlich. Deshalb werden für erste Abschätzungen eine konstante Dichteverteilung und Servoantriebe mit PID-Regler mit begrenzter Leistung angenommen. Die mechanischen Eigenschaften der Kabelsimulation entsprechen den Daten des Kabeltyps „Aircom Plus”, für das detaillierte Datenblätter erhältlich sind.
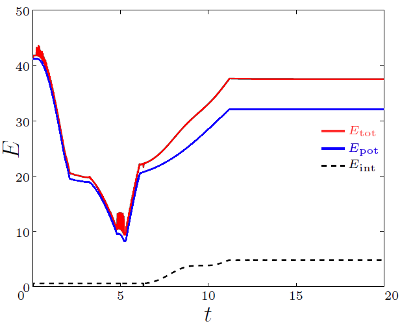
Wie aus der Animation und der Darstellung der Energieverläufe ersichtlich ist, können bei diesem Demonstrationsträger die Starrkörper und Balken in Direktorformulierung ihre Stärken ausspielen: Die geometrisch exakten Balken werden mit großen Starrkörperbewegungen und moderaten Verzerrungen insbesondere im Biege- und Torsionsbereich belastet. Die Augmentierungstechnik der Drehgelenke erlaubt eine problemlose Einbindung von Antriebsmodellierungen in die Methodik der flexiblen Mehrkörpersysteme.